




ΦΕΚ ίδρυσης και λειτουργίας εργαστηρίου INDEL (1723/τ.B’/16.05.2019)
Διευθυντής Εργαστηρίου INDEL: Αν. Καθ. Παρασκευάς Παπανίκος (ΦΕΚ 457/τ. ΥΟΔΔ/22.07.2019)
Γενική Περιγραφή και Αποστολή (mission statement)
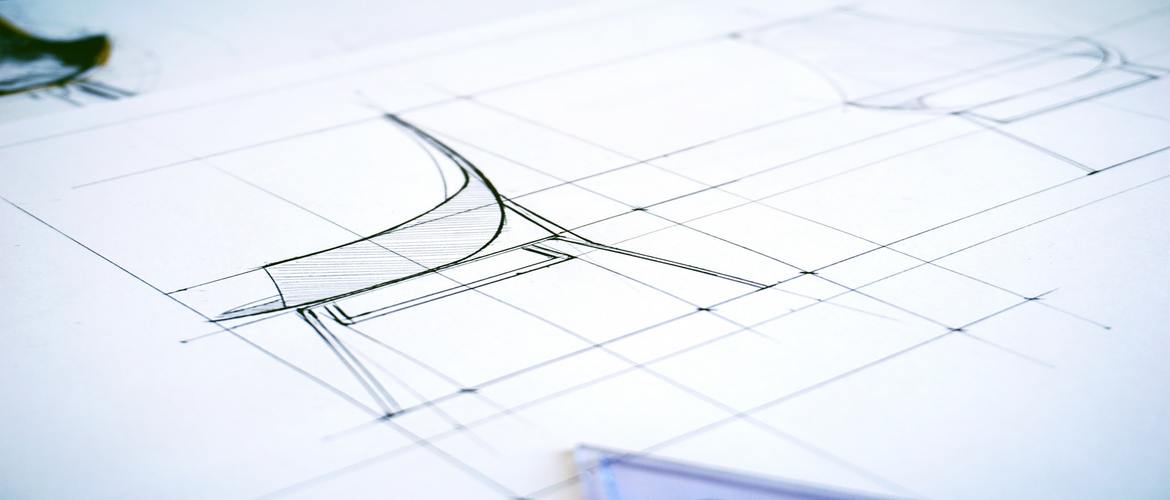
Σκοπός του εργαστηρίου «Ολοκληρωμένου Βιομηχανικού Σχεδιασμού» - INDEL είναι η υποστήριξη ακαδημαϊκών και ερευνητικών δραστηριοτήτων οι οποίες συνδέονται με τις φάσεις σχεδίασης, μηχανικής, βελτιστοποίησης και κατασκευής ενός βιομηχανικού προϊόντος. Σε αυτό το πλαίσιο, η έρευνα που διεξάγεται στα πλαίσια του εργαστηρίου INDEL εστιάζει σε θέματα που αφορούν στον κύκλο ζωής προϊόντος (product life-cycle) μέχρι και το στάδιο της παραγωγής του. Πιο συγκεκριμένα, το εργαστήριο δραστηριοποιείται σε διαφορετικούς ερευνητικούς τομείς που συμπληρώνουν την εικόνα μίας ολοκληρωμένης λεπτομερούς σχεδίασης, από τον εννοιολογικό και προκαταρκτικό σχεδιασμό, την 3Δ παραμετρική μοντελοποίηση, την επιλογή υλικών, τη μηχανική ανάλυση και βελτιστοποίηση, έως και την σχεδίαση για παραγωγή και τη δημιουργία φυσικών πρωτοτύπων.
Ως προς το εκπαιδευτικό σκέλος, το εργαστήριο καλύπτει ένα μεγάλο πλήθος γνωστικών αντικειμένων και μαθημάτων που συνδέονται με την 2η Κατεύθυνση του Τμήματος (Σχεδίαση με Η/Υ). Μέσω του εργαστηρίου INDEL, οι φοιτητές/ήτριες του τμήματος εξοικειώνονται με σύγχρονα εργαλεία και τεχνολογίες που θα συναντήσουν στην μετέπειτα επαγγελματική τους σταδιοδρομία. Το εργαστήριο υποστηρίζει πλήθος προπτυχιακών και μεταπτυχιακών διπλωματικών εργασιών.
Παράλληλα το εργαστήριο υποστηρίζει μέσα από σεμινάρια, συνέδρια, θερινά σχολεία, συμβουλευτικά ή αναπτυξιακά έργα και μελέτες, αποφοίτους, ερευνητές και επαγγελματίες που δραστηριοποιούνται στον χώρο της σχεδίασης ή σε άλλα πλαίσια όπου απαιτείται η σχεδίαση ενός βιομηχανικού προϊόντος.
Οι στόχοι και οι υπηρεσίες του εργαστηρίου INDEL αναλύονται ως εξής:
-
Κάλυψη των εκπαιδευτικών αναγκών σε προπτυχιακό και μεταπτυχιακό επίπεδο του οικείου τμήματος σε θέματα που εμπίπτουν στα γνωστικά αντικείμενα του εργαστηρίου.
-
Διεξαγωγή βασικής και εφαρμοσμένης έρευνας.
-
Συνεργασία με ερευνητικούς φορείς, ακαδημαϊκά ιδρύματα, οργανισμούς και φορείς ημεδαπής και αλλοδαπής.
-
Διοργάνωση εκπαιδευτικών προγραμμάτων, προγραμμάτων δια-βίου μάθησης, σεμιναρίων, θερινών σχολείων και εκθέσεων.
-
Διοργάνωση επιστημονικών διαλέξεων, ημερίδων, σεμιναρίων, συμποσίων, συνεδρίων και άλλων επιστημονικών εκδηλώσεων.
-
Συμμετοχή σε διεθνή και εθνικά ερευνητικά και αναπτυξιακά προγράμματα.
-
Παροχή υπηρεσιών σχεδίασης προϊόντων και συμβουλευτικής υποστήριξης σε φορείς και ιδιώτες, εκπόνηση μελετών και προτάσεις αξιολόγησης και βελτίωσης.
Τομείς έρευνας
Η έρευνα του εργαστηρίου αφορά σε σύγχρονα θέματα από τους επιστημονικούς χώρους:
-
Σχεδίαση με Η/Υ (Computer-Aided Design),
-
Γραφικά με Η/Υ (Computer Graphics),
-
Παραμετρική Σχεδίαση και Γεωμετρική Μοντελοποίηση (Geometric Modeling),
-
Ανάλυση με Η/Υ (Computer-Aided Engineering),
-
Μηχανική Υλικών,
-
Εργονομία,
-
Σχεδίαση Σκίτσου με Η/Υ (Computer-Aided Sketch Design),
-
Σχεδιασμός Μηχανοτρονικών και Ρομποτικών Συστημάτων,
-
Σχεδίαση Κίνησης,
-
Αντίστροφη Μηχανική,
-
Ταχεία Πρωτοτυποποίηση.









Ο εξοπλισμός του εργαστηρίου περιλαμβάνει σύγχρονα μηχανήματα και λογισμικά που μπορούν να κατηγοριοποιηθούν ως εξής:
-
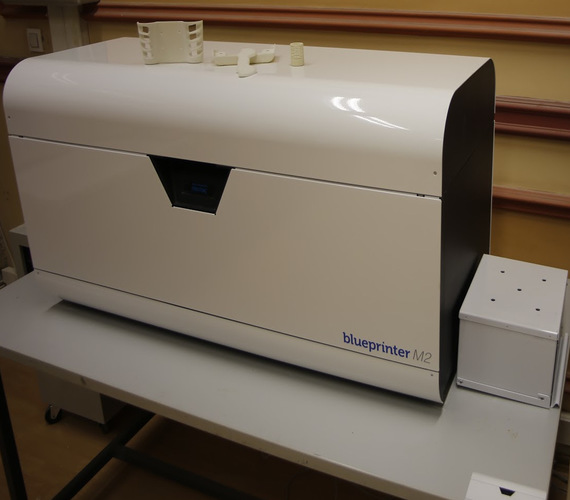
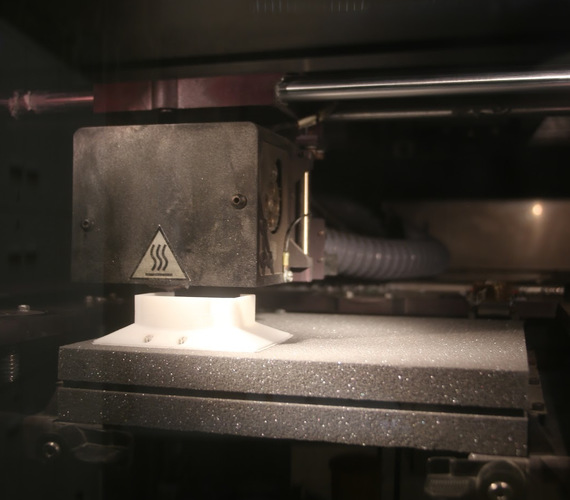
Συστήματα ταχείας πρωτοτυποποίησης (3D printers): Stratasys Prodigy Plus, Stratasys Dimension Machine, Blueprinter M2, Zortrax inspire, Markforged mark 2.
-
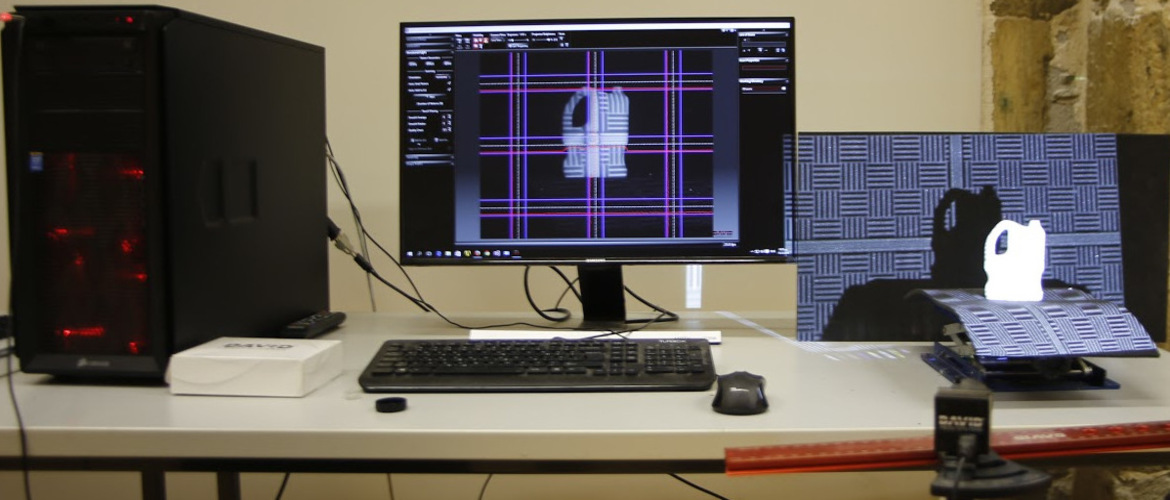
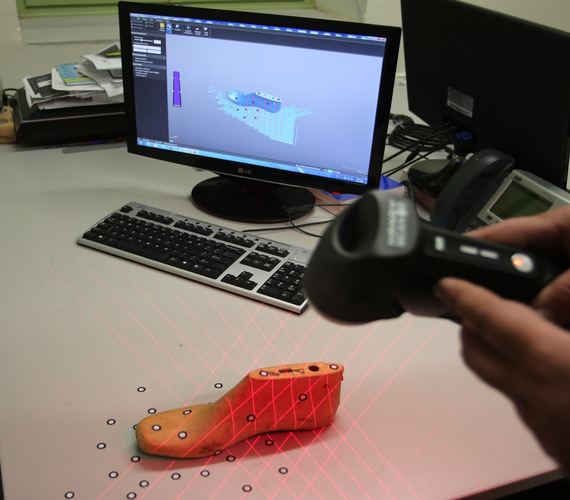
Συστήματα αντίστροφης μηχανικής (3D scanners): 3D Laser Scanner SLS 2, Creaform Handyscan 3D Portable 3d Scanning Machine
-
Μηχανές εφελκυσμού: Shimadzu (100KN), Yuelian YL102 (5KN)
-
Μικροσκόπια: ZEISS Scope A 1 - Οπτικό μεταλλογραφικό μικροσκόπιο 1000Χ, ZEISS STEMI 200 - C - Στερεο-μικροσκόπιο.
-
Επιτραπέζιο σύστημα κοπής cnc: Roland MDX-40A
-
Επιτραπέζιο σύστημα laser-cutter & engraver : Universal Laser Systems
-
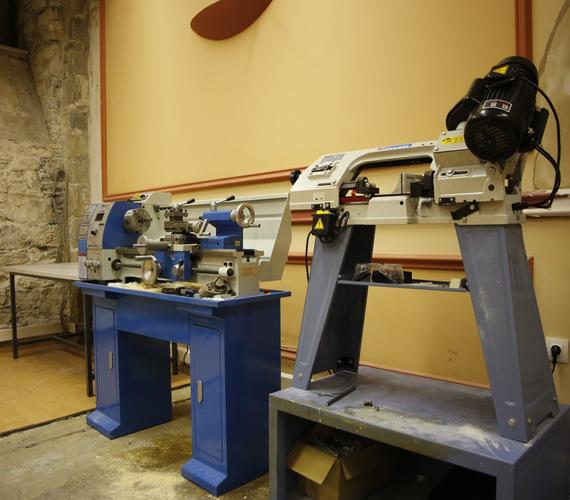
Παραδοσιακός μηχανουργικός εξοπλισμός: τόρνος, κοπτικά μηχανήματα, μηχανήματα συγκολλήσεων, μηχάνημα κατασκευής καλουπιών, κοκ.
-
Λογισμικά σχεδίασης & ανάλυσης: Creo Parametric, Creo Simulate, MIMICS, Geomagic Studio, CES EduPack, AutoCAD, 3D Studio Max, Inventor.
- Μη Επανδρωμένα Αεροσκάφη DJI TELLO (x5).
- Ρομποτικός βραχίονας Kawasaki RS05N.
- Ανθρωπόμορφο ρομπότ Robotis OP2.
- Προσομοίωση και προγραμματισμός βιομηχανικών robot: RoboDK






- 2023-2025: Σχεδιασμός πολλαπλών μεταλλικών υλικών για τρισδιάστατη εκτύπωση - MADE-3D, CL4 – Digital, Industry and Space.
- 2023-2024: Ανακύκλωση και επαναχρησιμοποίηση αφρών από πολυμερή σε υλικά με βάση το τσιμέντο-COAST-EPS, ΠΡΑΣΙΝΟ ΤΑΜΕΙΟ-ΦΥΣΙΚΟ ΠΕΡΙΒΑΛΛΟΝ & ΚΑΙΝΟΤΟΜΕΣ ΔΡΑΣΕΙΣ
- 2022-2025: Corrosion susceptibility, degradation and protection of advanced Al-Li aluminium alloys – CorLi, ΕΛΛΗΝΙΚΟ ΙΔΡΥΜΑ ΕΡΕΥΝΑΣ ΚΑΙ ΚΑΙΝΟΤΟΜΙΑΣ
- 2020-2023: Ψηφιακός Μετασχηματισμός Νοτίου Αιγαίου στον Πολιτισμό και Τουρισμό, Επιχειρησιακό Πρόγραμμα Ανταγωνιστικότητα και Επιχειρηματικότητα (ΕΠΑΝ ΙΙ).
- 2020-2023: Δίκτυο Αριστείας στην Αγροδιατροφική Έρευνα και Καινοτομία του Νοτίου Αιγαίου, Επιχειρησιακό Πρόγραμμα Ανταγωνιστικότητα και Επιχειρηματικότητα (ΕΠΑΝ ΙΙ).
- 2020-2023: Recycling and new product development (Re_Product), Centre for Sustainable and Cyclic Bioeconomy of South Aegean (Aegean_BIOECONOMY), Regional Excellence Program (code 80459)
- 2018-2021: Design and Innovation Capacity Building in India / DESINNO, Erasmus+ Capacity Building, Grant agreement 598404-EPP-1-2018-1-IN-EPPKA2-CBHE-JP - ENV2.
- 2019-2022: SciLED-Footwear in the 21st century: New skills for the design of drastically improved comfort, sustainable, fashion-oriented and scientifically-led footwear products, Erasmus+ Knowledge Alliance, PROJECT NUMBER – 601137-EPP-1-2018-1-RO-EPPKA2-KA.
-
2018-2021: Design and development of a Reconfigurable Metamorphic Manipulator System (OVIDIOUS), 1st announcement of research projects ELIDEK for the reinforcement of postdoctoral researchers/three, funded by the General Secretariat for Research and Technology (GSRT) and the Hellenic Foundation for Research and Innovation (HFRI) (Code: 1184).
-
2018-2021: Development of an innovative integrated system for assessing the potential biochemical production of methane (BMP) from different sources of biomass (Green. BMP), Operational Program Competitiveness, Entrepreneurship and Innovation, under the call RESEARCH – CREATE – INNOVATE, co-funded by the European Union and the General Secretariat for Research and Technology (GSRT) (project code:T1EDK-03148)
-
2018: Integrated industrial design of the Prometheus 5 energy production system, funding SWISS SA.
-
2018: Design and production of a functional prototype for electric car, financing BLUE RAYS.
-
2014-2015: Design of lubricant packaging, financing CYCLON S.A.
-
2012-2015: Research Program “Excellence”: Development of cost-effective and accurate computer-aided design and engineering (CAD/CAE) tools for the determination and optimization of footwear comfort parameters (OPT-SHOES). Website (http://optshoes.syros.aegean.gr/)
-
2012-2015: Research program ARCHIMIDIS III: Experimental and theoretical investigation of mechanical properties degradation of the aeronautical Aluminum alloy 2024 due to corrosion (TEI Piraeus Coordinator).
-
2012: Improvement of the skeleton of a clean space ceiling, no. Coupon: 12140565-05-000288 in the context of the action "Iinnovation vouchers for small and medium enterprises – Vouchers for SMEs".
-
2011: Geometric modeling and photorealistic depiction of a model of an ancient Pentikontoros galley, private funding.
-
2011: Development of lighting for pools controlled by remote control, No. Coupon: 79104403-05-000016 in the context of the action "Innovation vouchers for small and medium enterprises – Vouchers for SMEs".
-
2010: Monitoring of structural health of fibre-reinforced glass fibers using implanted carbon nanotube fibres, John S. Latsis Public Benefit Foundation (NTUA coordinator).
-
2009-2012: SMILIES: Small Mediterranean Insular Light Industries Enhancement and Support, 1G-MED08-454.
-
2008: Electronic Services for the support of traditional folk art, private financing.
-
2007-2009: Parametric CAD system for the reconstruction of traditional jewels, private financing
-
2004-2008: Modern garment design system in two-or three-dimensions, private financing.
-
2003-2008: Virtual Environment of furniture presentation, private funding.
- An Ontology-based Tool for Supporting the Constraining Strategy of MCAD Objects
Kyratzi, S., Azariadis, P.
Computer-Aided Design and Applications, 2024, 21(4), pp. 659–676 - Serial Metamorphic Manipulator Dynamics Formulation Implementing Screw Theory Tools
Stravopodis, N., Moulianitis, V.C.
ASME Letters in Dynamic Systems and Control, 2024, 4(4), 041006 - Degradation assessment of high-density polyethylene (HDPE) debris after long exposure to marine conditions
Lourmpas, N., Papanikos, P., Efthimiadou, E.K., ... Lekkas, D.F., Alexopoulos, N.D.
Science of the Total Environment, 2024, 954, 176847 - Effect of filler materials on the tensile properties and fracture toughness of laser beam welded AA2198 joints under different ageing conditions
Examilioti, T.N., Karanikolas, D., Riekehr, S., ... Kashaev, N., Alexopoulos, N.D.
Engineering Fracture Mechanics, 2024, 295, 109811 - Assessing the weathering-induced degradation on the structural integrity of high-density polyethylene
Lourmpas, N., Bailas, K., Papanikos, P., ... Efthimiadou, E.K., Alexopoulos, N.D.
Materials Today: Proceedings, 2023, 93, pp. 844–849 - Introducing a Biomimetic Rig for Simulating Human Gait Cycles and Its Potential Applications
Kampouris, C., Azariadis, P., Moulianitis, V.
Lecture Notes in Networks and Systems, 2023, 783 LNNS, pp. 152–163 - Effect of corrosion exposure on the mechanical performance of aeronautical aluminum alloy 2024 riveted sheets
Charalampidou, C.-M., Grammatikos, G., Papanikos, P., Kourkoulis, S., Alexopoulos, N.D.
Materials Today: Proceedings, 2023, 93, pp. 705–711 - Elliptic Gabriel Taubin smoothing of point clouds
Agathos, A., Azariadis, P., Kyratzi, S.
Computers and Graphics (Pergamon), 2022, 106, pp. 20–32 - Integrated Design Intent of 3D Parametric Models
Kyratzi, S., Azariadis, P.
CAD Computer Aided Design, 2022, 146, 103198 - Design, Development, and a Pilot Study of a Low‐Cost Robot for Child–Robot Interaction in Autism Interventions
Katsanis, I.A., Moulianitis, V.C., Panagiotarakos, D.T.
Multimodal Technologies and Interaction, 2022, 6(6), 43 - Exploiting Design Intent to Produce Fail-Safe Extrusion-Based Additive Manufacturing Parts
Bailas, K., Louka, E.-S., Papanikos, P.
Macromolecular Symposia, 2022, 404(1), 2100318 - Minimize the Production Cost of Extrusion-Based AM Parts by Optimizing Their Internal Building Geometry
Bailas, K., Papanikos, P.
Macromolecular Symposia, 2022, 404(1), 2100288 - Experimental and numerical investigation of laser beam-welded Al-Cu-Li joints using micro-mechanical characteristics
Examilioti, T.N., Papanikos, P., Kashaev, N., Klusemann, B., Alexopoulos, N.D.
Journal of Materials Research and Technology, 2022, 19, pp. 2431–2446 - Numerical investigation of laser beam-welded AA2198 joints under different artificial ageing conditions
Examilioti, T.N., Germanou, A., Papanikos, P., ... Klusemann, B., Alexopoulos, N.D.
Procedia Structural Integrity, 2022, 42, pp. 244–250 - MARINE PLASTIC WASTE DEGRADATION STUDY AND RECYCLABILITY PROSPECTS
Lourmpas, N., Bailas, K., Zacharopoulos, N., ... Lekkas, D.F., Alexopoulos, N.D.
38th Danubia-Adria Symposium on Advances in Experimental Mechanics, DAS 2022, 2022 - Optimization of the carbon nanotubes reinforcement in cement-based materials
Stylianos, A.G., Faidra, G.Th., Zoi, M.S., Paraskevas, P., Nikolaos, A.D.
Procedia Structural Integrity, 2021, 37(C), pp. 485–491 - Jimeno-Morenilla A., Molina-Carmona, R., Azariadis P., Kyratzi S., Moulianitis V., Technology enablers for the implementation of Industry 4.0 to traditional manufacturing sectors: a review, Computers in Industry, 2020, https://doi.org/10.1016/j.compind.2020.103390
- Xidias E., Moulianitis V., Azariadis Ph., Optimal robot task scheduling based on adaptive neuro fuzzy system and genetic algorithms, Xidias, E., Moulianitis, V. & Azariadis, P. Optimal robot task scheduling based on adaptive neuro-fuzzy system and genetic algorithms. Int J Adv Manuf Technol, 2020, https://doi.org/10.1007/s00170-020-06166-0
- Zacharia, P. T., & Xidias, E. K. (2020). AGV routing and motion planning in a flexible manufacturing system using a fuzzy-based genetic algorithm. The International Journal of Advanced Manufacturing Technology. https://doi.org/10.1007/s00170-020-05755-3
- Kyratzi S., Azariadis P. A Constraint-based Framework to Recognize Design Intent during Sketching in Parametric Environments, CAD & A (Taylor & Francis), 18(3), 2021, 545-560, http://www.cad-journal.net/files/vol_18/CAD_18(3)_2021_545-560.pdf
- Sharkawy, A. N., Papakonstantinou, C., Papakostopoulos, V., Moulianitis, V. C., & Aspragathos, N. (2020), Task Location for High Performance Human-Robot Collaboration. Journal of Intelligent & Robotic Systems, 1-20. http://dx.doi.org/10.1007/s10846-020-01181-5
- Koukos-Papagiannis, C., Moulianitis, V., & Aspragathos, N. (2020), Classification of All Non-Isomorphic Regular and Cuspidal Arm Anatomies in an Orthogonal Metamorphic Manipulator. Robotics, 9(2), 20. http://dx.doi.org/10.3390/robotics9020020
- Miatliuk, K, Nawrocka, A., Holewa, K., Moulianitis, V. (2020), Conceptual Design of BCI for Mobile Robot Control, Applied Sciences, 10 (7), 2557. http://dx.doi.org/10.3390/app10072557
- Stravopodis, N. A., and V. C. Moulianitis (2021), Rectilinear tasks optimization of a modular serial metamorphic manipulator, Journal of Mechanisms and Robotics 13, no.1. http://dx.doi.org/10.1115/1.4047727
- Katsanis, Ilias A., Moulianitis, Vassilis C. (2021), An Architecture for Safe Child–Robot Interactions in Autism Interventions. Robotics 10, no. 1: 20.
- Wolniakowski A, Valsamos C, Miatliuk K, Moulianitis V, Aspragathos N. (2021), Optimization of Dynamic Task Location within a Manipulator’s Workspace for the Utilization of the Minimum Required Joint Torques. Electronics, 10(3):288.
- Kattis M.A., Gkouti E., Papanikos P. (2019) Energy and volume changes due to the formation of a circular inhomogeneity in a residual deviatoric stress field, Acta Mechanica, 230(10), 3457–3475.
- Bailas K., Papanikos P. (2019) Design and Manufacturing of a Device Made of Additive Manufacturing Machines for Fast and Reliable Measurement of Material Stiffness. In: Fortin C., Rivest L., Bernard A., Bouras A. (eds) Product Lifecycle Management in the Digital Twin Era. PLM 2019. IFIP Advances in Information and Communication Technology, vol 565. Springer, Cham. https://doi.org/10.1007/978-3-030-42250-9_22
- Bailas K., Papanikos P. (2020) Injecting epoxy resin to specially designed voids of additively manufactured parts to improve mechanical properties. Procedia manufacturing, in press, Special volume from 30th International Conference on Flexible Automation and Intelligent Manufacturing (FAIM2020) 15-18 June 2020, Athens, Greece.
- Kattis M.A., Papanikos P., Tzamali M.E., Gkouti E. (2020), Design equations of neutral elliptical coated inhomogeneities in longitudinal shear, Acta Mechanica, 231(5), 1837–1847.
- Kattis M.A., Gkouti E., Papanikos P. (2020) The elliptic homoeoid inclusion in plane elasticity, Meccanica, 55(7), 1509-1523.
-
Xidias E., Azariadis P., Energy Efficient Motion Design and Task Scheduling for an Autonomous Vehicle. Proceedings of the Design Society: International Conference on Engineering Design, 2019, 1(1), 2853-2862. https://doi.org/10.1017/dsi.2019.292
-
Moulianitis V.C., Xidias E., Azariadis P. (2019) Optimal Task Placement in a Metamorphic Manipulator Workspace in the Presence of Obstacles. In: Aspragathos N., Koustoumpardis P., Moulianitis V. (eds) Advances in Service and Industrial Robotics. RAAD 2018. Mechanisms and Machine Science, vol 67. Springer, Cham, https://doi.org/10.1007/978-3-030-00232-9_38
-
Koutkalaki X., Azariadis Ph., Papanikos P., Parametric finite element analysis for the evaluation of the effect of osteoporosis on the mechanical behavior of foot, International Conference of the Polish Society of Biomechanics - Biomechanics 2018, Zielona Góra, Sept. 5-7, 2018.
-
Bailas K., Papanikos P. (2018) A New Methodology of Constructing Products Using Additive Manufacturing Technology: Case Study of a Push Button. In: Chiabert P., Bouras A., Noël F., Ríos J. (eds) Product Lifecycle Management to Support Industry 4.0. PLM 2018. IFIP Advances in Information and Communication Technology, vol 540. Springer, Cham, https://doi.org/10.1007/978-3-030-01614-2_64
-
Agathos A., Azariadis Ph., 3D Reconstruction of Skeletal Mesh Models and Human Foot Biomodel Generation Using Semantic Parametric-Based Deformation, International Journal of Computers and Applications, 2018, https://doi.org/10.1080/1206212X.2018.1443316.
-
Koutkalaki X., Azariadis Ph., Papanikos P., Parametric finite element analysis for the evaluation of the effect of osteoporosis on the mechanical behavior of foot, International Conference of the Polish Society of Biomechanics - Biomechanics 2018, Zielona Góra, Sept. 5-7, 2018.
-
Dimeas, Fotios, Vassilis C. Moulianitis, and Nikos Aspragathos. "Manipulator performance constraints in human-robot cooperation." Robotics and Computer-Integrated Manufacturing 50 (2018): 222-233.
-
Moulianitis, V. C., G-AD Zachiotis, and N. A. Aspragathos. "A new index based on mechatronics abilities for the conceptual design evaluation." Mechatronics 49 (2018): 67-76.
-
Portouli, E., Nathanael, D., Gkikas, K., Papakostopoulos, V., & Amditis, A. (2018). Naturalistic observation of interactions between car drivers and pedestrians in high density urban settings. In Proceedings of the 20th Congress of the International Ergonomics Association - IEA 2018: Creativity in Practice, Florence, Italy. Springer (in press).
-
Papakostopoulos, V., Nathanael, D., & Marmaras, N. (2018). Ergonomics for impartiality and efficiency in the law-courts of ancient Athens. In Proceedings of the 20th Congress of International Ergonomics Association - IEA 2018: Creativity in Practice, Florence, Italy. Springer (in press).
-
Syrimpeis, Vasileios, Vassilis Moulianitis, Nikos A. Aspragathos, and Elias Panagiotopoulos. "A Knowledge Based System for the Selection of Muscles for Gait Phase Detection using EMGs." International Journal of Healthcare Information Systems and Informatics (IJHISI) 12, no. 2 (2017): 18-45.
-
Papakostopoulos, V., Marmaras, N., & Nathanael, D. (2017). The “field of safe travel” revisited: interpreting driving behaviour performance through a holistic approach. Transport Reviews, 37(6), 695-714.
-
Zissis D., Lekkas D., Azariadis Ph., Papanikos P., Xidias E., Collaborative CAD/CAE as a Cloud Service, International Journal of Systems Science, 2017, 4(2), 339-355, http://dx.doi.org/10.1080/23302674.2016.1186237.
-
Azariadis Ph., On using density maps for the calculation of ship routes, Evolving Systems, 2017, 8(2), 135-145, http://dx.doi.org/10.1007/s12530-016-9155-7.
-
Papagiannis P., Azariadis Ph., Papanikos P., Evaluation and optimization of footwear comfort parameters using finite element analysis and a discrete optimization algorithm, 17th World Textile Conference AUTEX 2017, 29–31 May 2017, Corfu, Greece, IOP Conf. Ser.: Mater. Sci. Eng. 254(2017) 162010, http://dx.doi.org/10.1088/1757-899X/254/16/162010.
-
Xidias E., Azariadis Ph., Computing Collision-Free Motions for a Team of Robots Using Formation and Non-Holonomic Constraints, Robotics and Autonomous Systems, 82 (2016) 15–23, http://dx.doi.org/10.1016/j.robot.2016.04.008.
-
Xidias E., Azariadis Ph., Aspragathos N., Mission design of mobile manipulators in cluttered environments for service applications, International Journal of Robotics Applications and Technologies, 2016, 4(1), 1-18, http://dx.doi.org/10.4018/IJRAT.2016010101.
-
Moulianitis, Vassilis C., Nikos A. Aspragathos, and Charalampos Valsamos. "Suboptimal Anatomy of Metamorphic Manipulators Based on the High Rotational Dexterity." In Advances in Reconfigurable Mechanisms and Robots II, pp. 509-519. Springer, Cham, 2016.
-
Moulianitis, Vassilis C., Aris I. Synodinos, Charalampos D. Valsamos, and Nikos A. Aspragathos. "Task-Based Optimal Design of Metamorphic Service Manipulators." Journal of Mechanisms and Robotics 8, no. 6 (2016): 061011.
-
Koutkalaki Z., Papagiannis P., Azariadis P., Papanikos P., Kyratzi S., Zissis D., Lekkas D., Xidias E., Towards a foot bio-model for performing finite element analysis for footwear design optimization using a Cloud infrastructure, Computer-Aided Design and Applications (Taylor & Francis), 2015, 1-12, http://dx.doi.org/10.1080/16864360.2015.1014728.
-
Papagiannis P., Koutkalaki Z., Azariadis P., Papanikos P., Definition and Evaluation of Plantar Mechanical Comfort for the Support of Footwear Design, Computer-Aided Design and Applications (Taylor & Francis), Special Issue: Technologies for Human Centric Free-form Products, 2015, http://dx.doi.org/10.1080/16864360.2015.1084189.
-
Xidias E., Aspragathos N., Azariadis P., Mission design of a team of service robots, in Handbook of Research on Robotics and Mechatronics, IGI Global, 2015, http://dx.doi.org/10.4018/978-1-4666-7387-8.ch023.
-
Koutkalaki Z., Papagiannis P., Azariadis P., Papanikos P., Finite element evaluation of the mechanical behaviour of a detailed foot/footwear model, 6th International Conference on Mechanics and Materials in Design, P.Delgada/Azores/Portugal, 26-30 July 2015.
-
Xidias E., Azariadis P., Motion Planning and Scheduling with Stochastic Demands, The 24th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2015, Bucharest, Romania, May 27-29, 2015 (Published at Advances in Intelligent Systems and Computing, Springer, http://dx.doi.org/10.1007/978-3-319-21290-6_43.
-
Koutkalaki Z., Azariadis P., Papanikos P., Parametric Study of the Effect of Sole’s Materials on Plantar Pressure Distribution Using a Finite Element Foot-Footwear Model, The 3rd International Leather Engineering Congress, May 21-22, 2015 Izmir, Turkey.
-
Papakostopoulos, V., Nathanael, D., Portouli, E., & Marmaras, N. (2015). The effects of changes in the traffic scene during overtaking. Accident Analysis and Prevention, 79, 126-132.
-
Xidias E., Koutkalaki Z., Papagiannis P., Papanikos P., Azariadis P., Foot Plantar Pressure Estimation using Artificial Neural Networks, 12th International Conference on Product Lifecycle Management, Doha (Qatar), Oct. 19-21, 2015 (Published at Product Lifecycle Management in the Era of Internet of Things, Volume 467 of the series IFIP Advances in Information and Communication Technology, Springer, http://dx.doi.org/10.1007/978-3-319-33111-9_3.
-
Kyratzi S., Azariadis P., Geometric Definition of the Hidden Part of a Line Drawing in a Sketch-to-Solid Methodology, Computer-Aided Design and Applications (Taylor & Francis), 2014, 1–11, http://dx.doi.org/10.1080/16864360.2014.981466.
-
Papagiannis P., Koutkalaki Z., Azariadis P., Footwear Plantar Mechanical Comfort: Physical Measures and Modern Approaches to Their Approximation, The 5th International Conference on Advanced Materials and Systems, October 23rd–25th, 2014, Bucharest, Romania.
-
Portouli, E., & Papakostopoulos, V. (2014). Adaptive warning strategies from multiple systems: A simulator study of drivers with different reaction times. In M. Kurosu (Ed.), Lecture Notes in Computer Science: Vol. 8512. Human-Computer Interaction: Applications and Services (pp. 485-493). Switzerland: Springer.
-
Azariadis P., Kyratzi S., Sapidis S., A hybrid-optimization method for assessing the realizability of wireframe sketches, 3D Research (Springer), 2013, 4(1), 1-11, http://dx.doi.org/10.1007/3DRes.01(2013)3.
-
Xidias E., Azariadis P., Fleet Sizing of Autonomous Vehicles with Kinodynamic Constraints, Proceedings of the RAAD 2013 22nd International Workshop on Robotics in Alpe-Adria-Danube Region, pp 64-71, September 11-13, 2013, Portorož, Slovenia.